
Absolute Encoders & Internal Indexing
Modern stabilized remote heads demand more than torque alone — they require precise, repeatable knowledge of position at all times.
The TORQ Head from NODO Film Systems is built around absolute encoder feedback and internal motor indexing, enabling a level of control and reliability that traditional motor and encoder systems struggle to achieve.
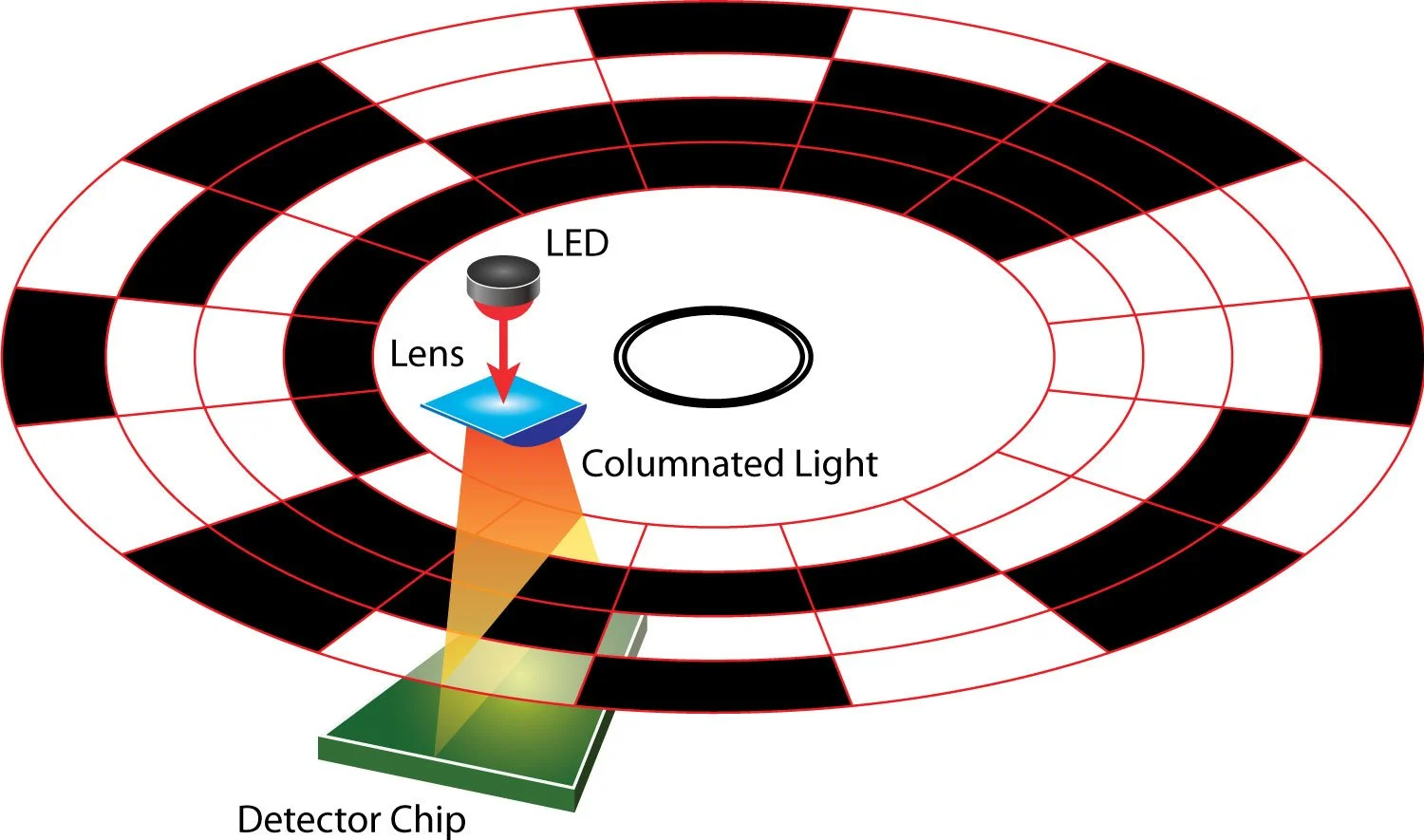
To visualize how absolute position feedback works conceptually, see the diagram below:
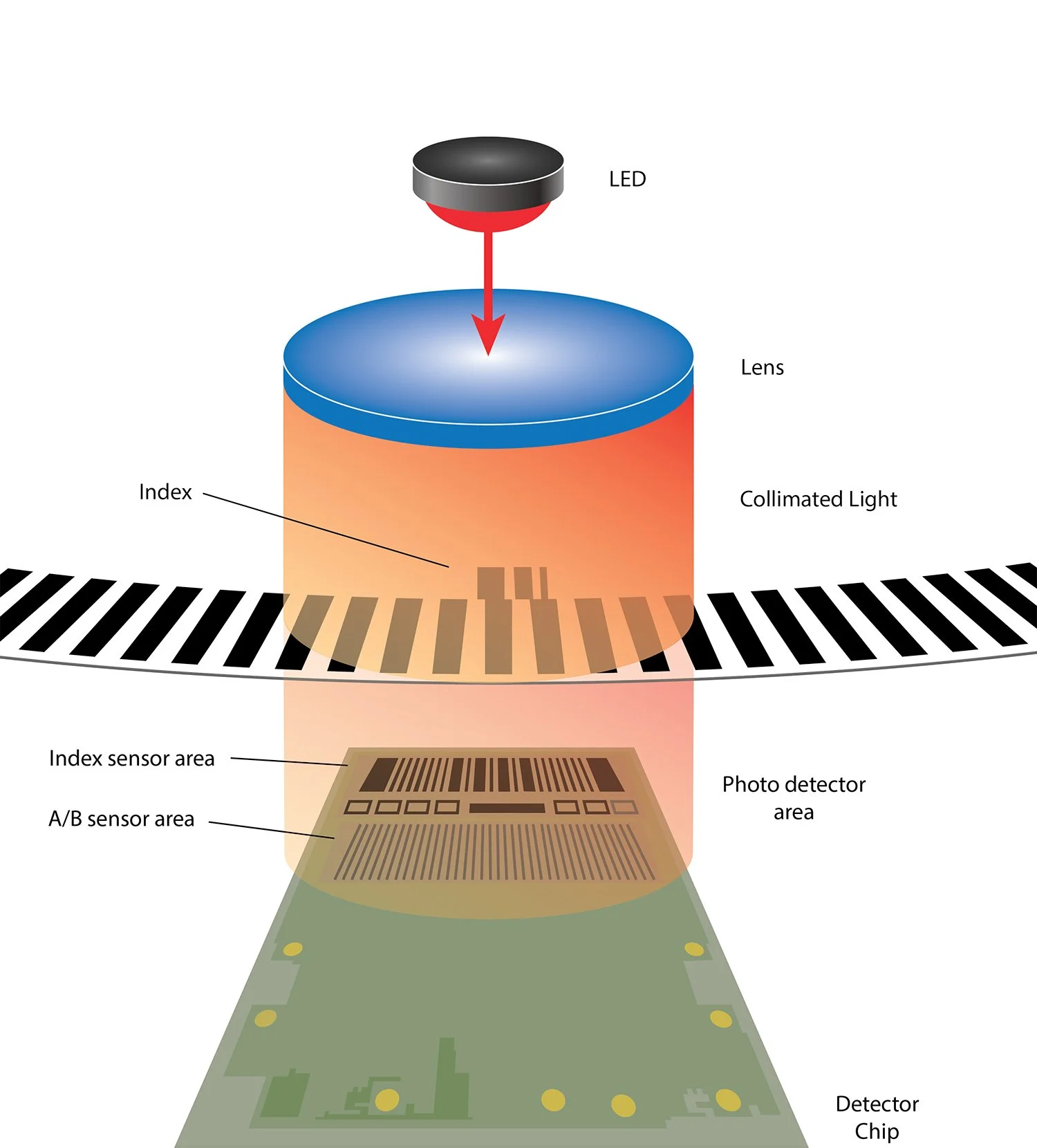
Conceptual illustration of absolute position encoding, where each angular position is uniquely identified to support precise internal indexing and consistent position awareness.
Why absolute encoders matter in stabilization
Traditional systems often rely on incremental encoders or inferred position tracking. These approaches:
Lose position on power loss
Require homing routines
Accumulate error over time
Absolute encoders provide true position awareness — instantly, accurately, and without guesswork.
Key Advantages for a Stabilized Remote Head
Always-known position
Absolute encoders report true shaft position immediately on power-up, eliminating homing routines and startup uncertainty.
Why it matters: faster setup, predictable behavior, and no surprise moves when systems power on.
Unique position patterns provide continuous awareness of rotational position.
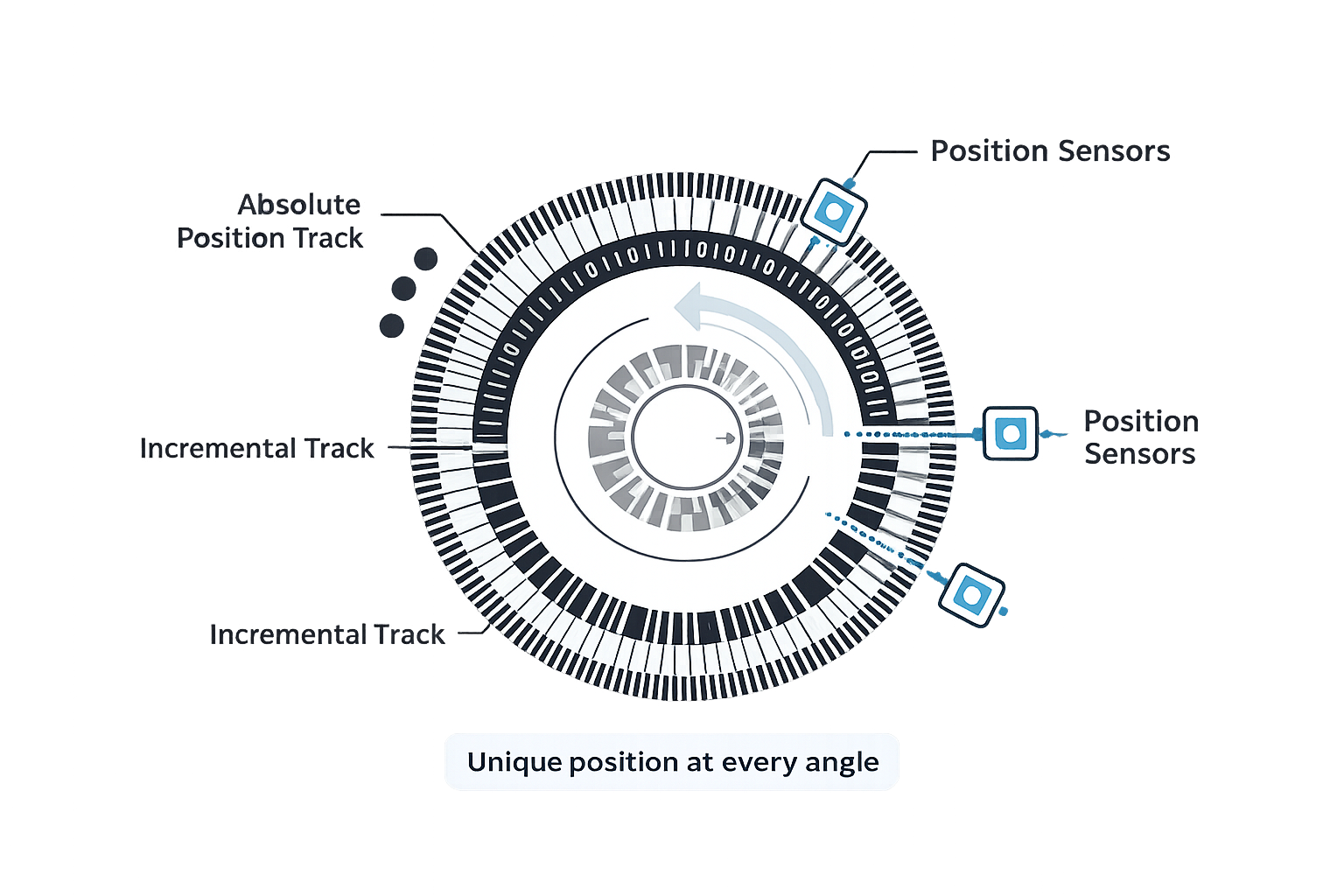
Absolute position feedback allows the motor to know exactly where it is at all times — enabling smoother motion, faster startup, and more reliable stabilization.
No accumulated positional drift
Because position is measured absolutely — not inferred — errors do not compound over time.
Why it matters: repeatable framing, reliable presets, and confidence on long takes or live broadcast moves.
High-resolution feedback for smooth control
Absolute encoders provide continuous, high-resolution position data directly at the motor.
Why it matters: smoother motion, finer control authority, and better long-lens performance.
Internal motor indexing
By indexing position internally at the motor, the system maintains a direct relationship between torque output and measured position.
Why it matters: tighter control loops, reduced latency, and more stable correction under dynamic loads.
Better fault handling and safety
Knowing exact position at all times allows the system to:
Detect unexpected motion
Enforce limits accurately
Recover gracefully from interruptions
Why it matters: safer operation and higher reliability in real-world production environments.
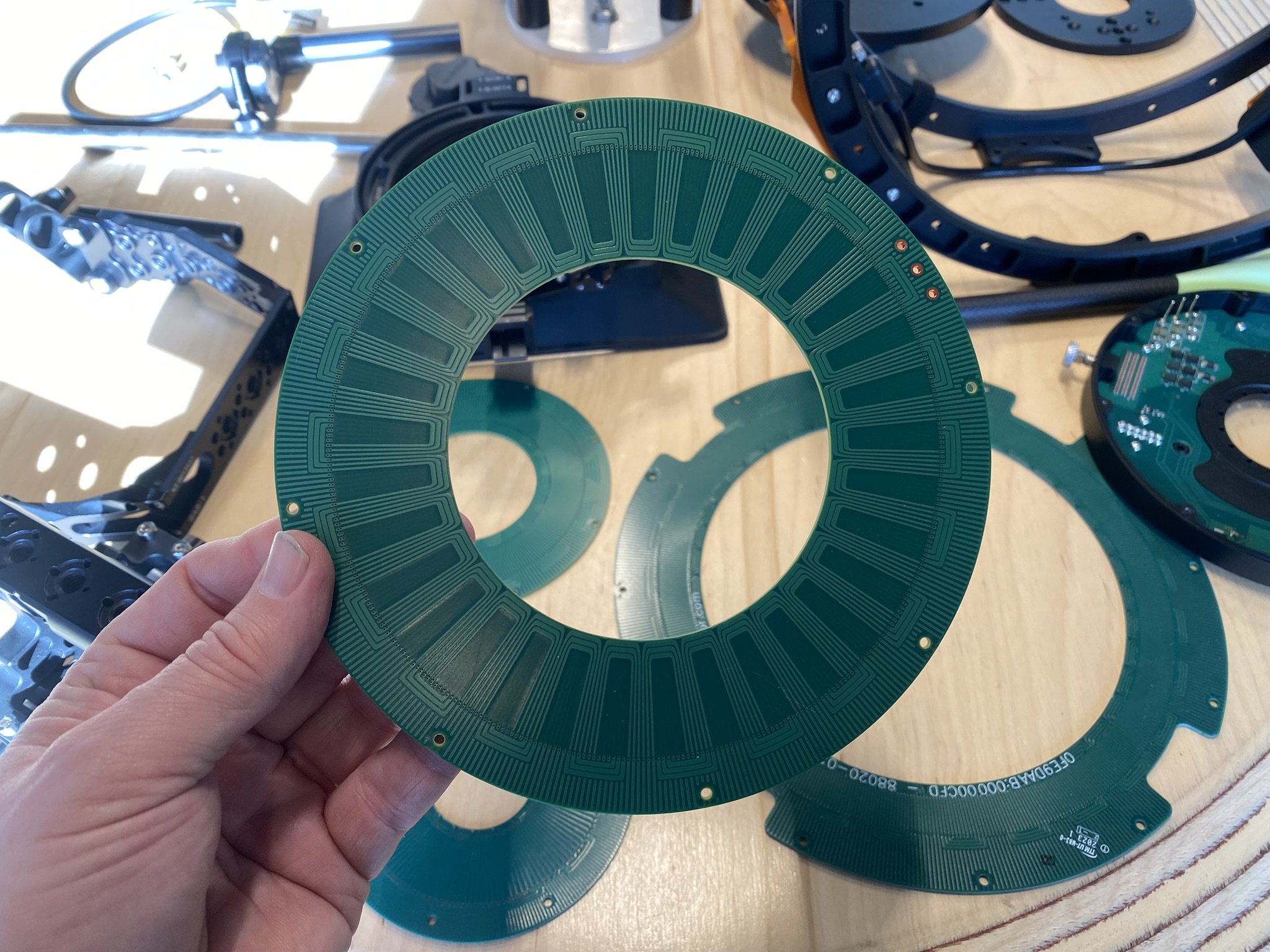
Why this pairs perfectly with PCB stator motors
PCB stator motor architecture enables:
Direct-drive torque
Minimal mechanical compliance
Highly predictable motor behavior
When combined with absolute encoder feedback and internal indexing, the result is a motor system that knows exactly where it is and exactly how it is applying torque — continuously. Internal indexing provides the position certainty that allows IIMS™ to apply torque proactively rather than reactively.
This is a foundational element of IIMS™ (Intelligent In-Motor Stabilization™).
What this means in practice
For operators and engineers, this translates to:
Faster power-up and deployment
Reliable presets and repeatable moves
Stable behavior under high inertia
Confidence in live, one-take environments
No homing. No guessing. No drift.
Absolute encoders and internal indexing allow TORQ to stabilize from a position of certainty — not estimation.